
NUST PNEC Students Develop Bio-Inspired Underwater Snake Robot
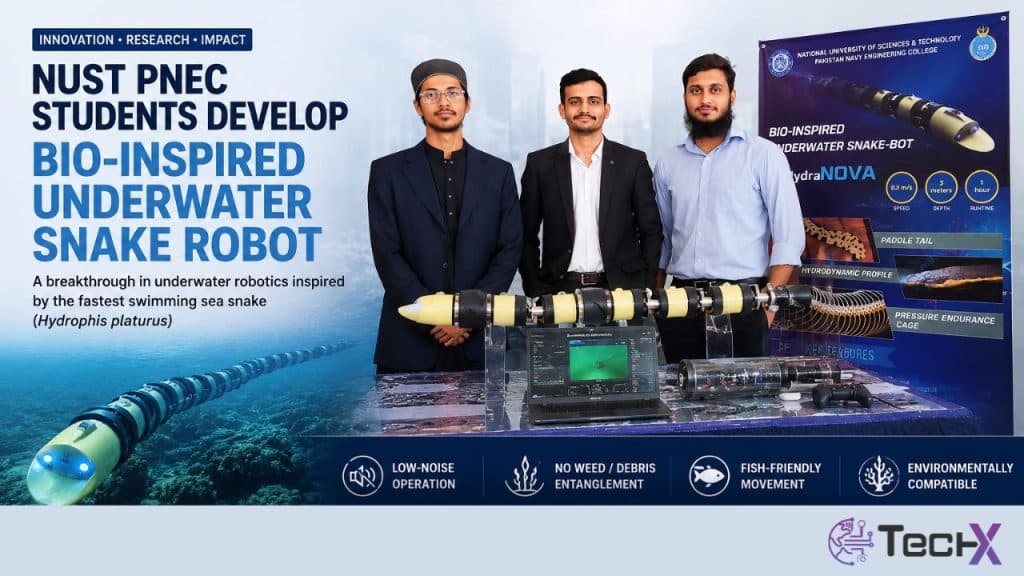
A team of Mechanical Engineering students from NUST PNEC has developed a Bio-Inspired Underwater Snake Robot based on the natural movement of yellow-bellied sea snakes (Hydrophis platurus), known for being the fastest swimming sea snakes.
The project, carried out by Hamza Imdad, Qazi Khizar Ali, and Hamza Hassan under the supervision of Dr. Khurram Kamal, marks a major milestone in underwater robotics research at NUST PNEC. It introduces a one-of-its-kind snake-bot capable of propeller-free underwater locomotion.




Unlike conventional underwater vehicles that depend on noisy rotating propellers, it glides smoothly through serpentine motion, closely mimicking the swimming pattern of the yellow-bellied sea snake. This bio-inspired propulsion enables low-noise operation, reduced debris and weed entanglement, and fish-friendly movement, allowing it to navigate mangroves, coral reefs, submerged structures, and narrow underwater spaces with minimal disturbance while being more environmentally compatible than conventional systems.
The robot can operate for up to one hour, reach depths of 3 meters, and achieve a speed of 0.3 m/s. Its scalable design also supports future improvements for deeper and more demanding underwater missions.
Conventional ROVs & UUVs often struggle in confined and cluttered environments due to their rigid structure and limited manoeuvrability. The snake-bot addresses this challenge through its flexible, modular body that can bend, turn, and move through passages where traditional systems may fail.
The team also successfully carried out the world’s first CFD analysis on sea snakes and combined it with motion modelling, buoyancy balancing, and structural simulations. The robot is remotely controlled, equipped with real-time video logging and a monitoring dashboard, and capable of low-turbulence spatial movement with neutral buoyancy.


With applications in marine ecosystem monitoring, underwater inspection, search and rescue, archaeology, and defence operations such as covert surveillance and reconnaissance, this project shows how nature-inspired engineering can enable safer, smarter, and efficient solutions.
Moving forward, the team aims to enhance autonomy, intelligent navigation, and real-world deployment, reflecting NUST’s growing role in global robotics innovation.
